COURSE – EV3 –
スピードボット
SpeedBot
Speedボットは簡単に作れる、走るロボットです。このロボットを使ってEV3クラスルームでのプログラミング方法を学びます。
LEVEL
開発環境
EV3
1. 組み立てよう(目標時間: 26分)
シンプルなデザインのロボットです。組み立ててみましょう。

2.動かしてみよう!
スピードボットはとても一般的なロボットです。2つのモーターで動きます。2つのモーターの動かし方を学んでみましょう。
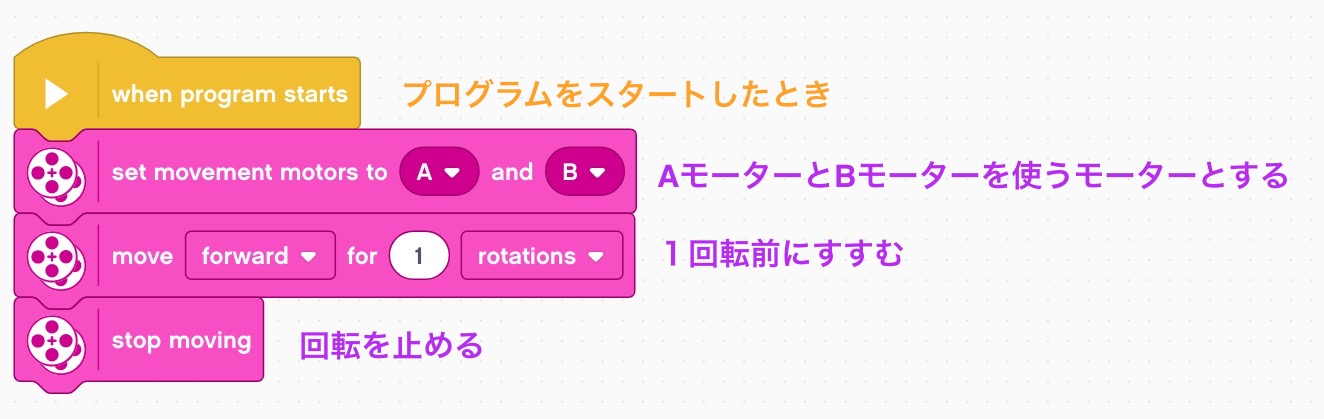
【前・後ろは下の通り決められる】
forward → 前
backward → 後ろ
【回す長さは下の3通りで決めれる】
rotations → 回転数(かいてんすう)
degrees → 角度(かくど)
seconds → 秒(びょう)

1.ロボットを後ろに動かしてみよう!
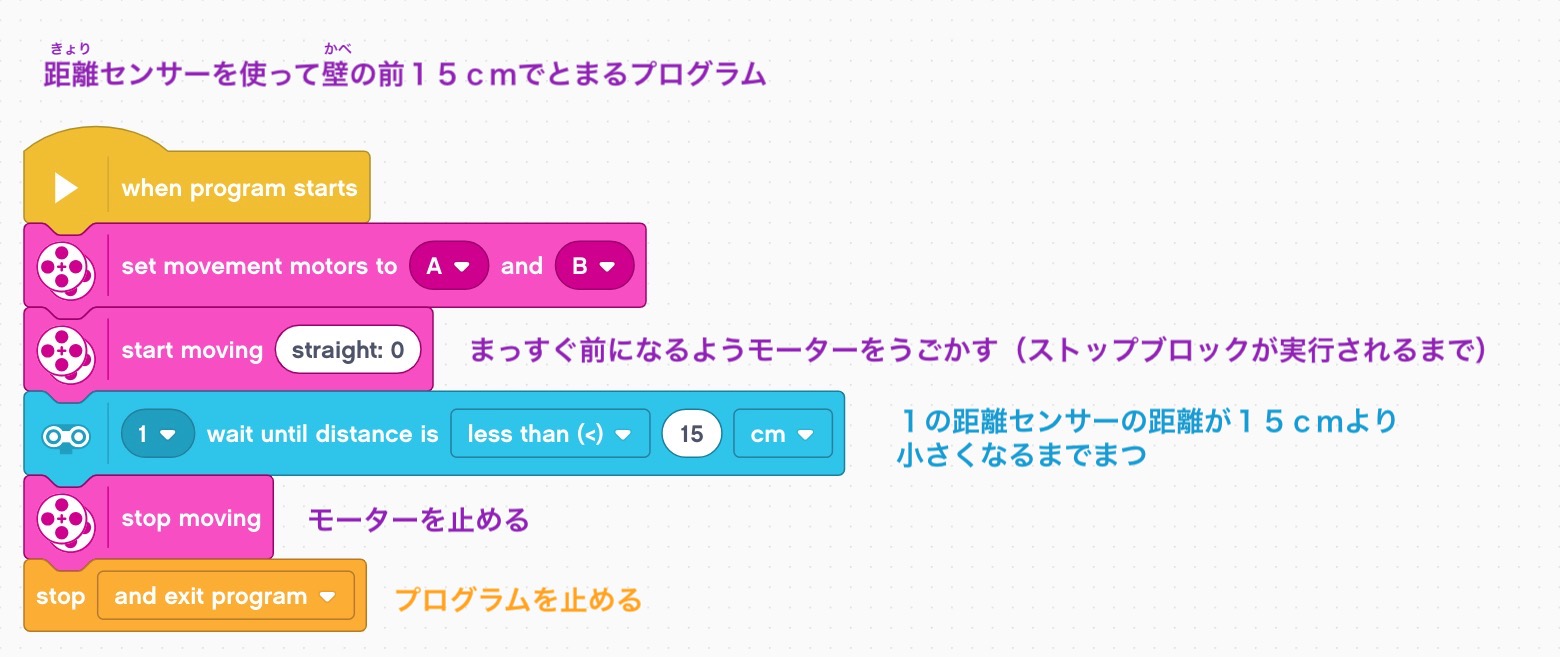
こんどは距離センサーをつかってかべから距離センサーまでの距離が15cmのところまで進むプログラムにしてみよう。
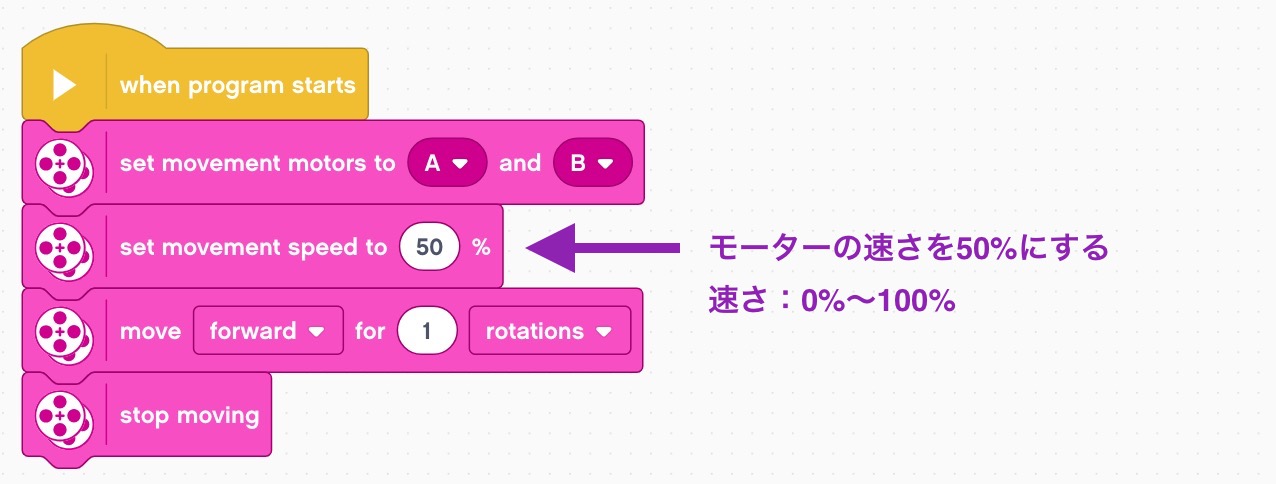
うえのプログラムから色々速さを変えて見よう
その他の2つのモーターを制御するブロック(むらさきブロック)の説明をします。
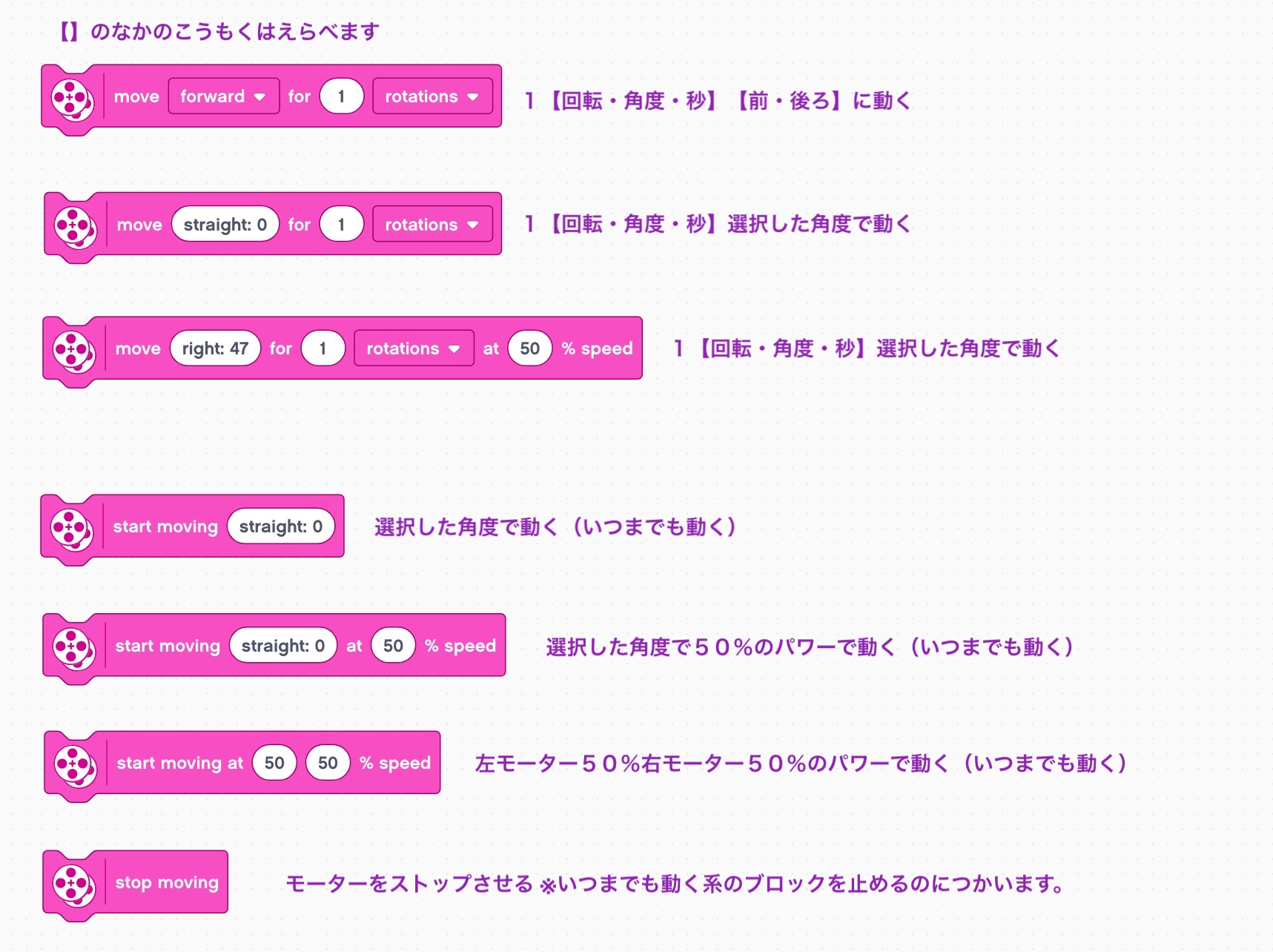
2つのモーターを制御するブロック(むらさきブロック)のそれぞれの動きをいろいろためして確認してみよう。
3. センサーをつかってみる
1.タッチセンサーを進むとかべにあたるいちにつけてみよう(センサーを2につなぐ)
2.先程のプログラムの「水色のブロック」の部分を↓のブロックにかえてみよう。

1.カラーセンサーを床から5mmくらいあけて下向きにつけてみよう(センサーを3につなぐ)
2.先程のプログラムの「水色のブロック」の部分を↓のブロックにかえてみよう。

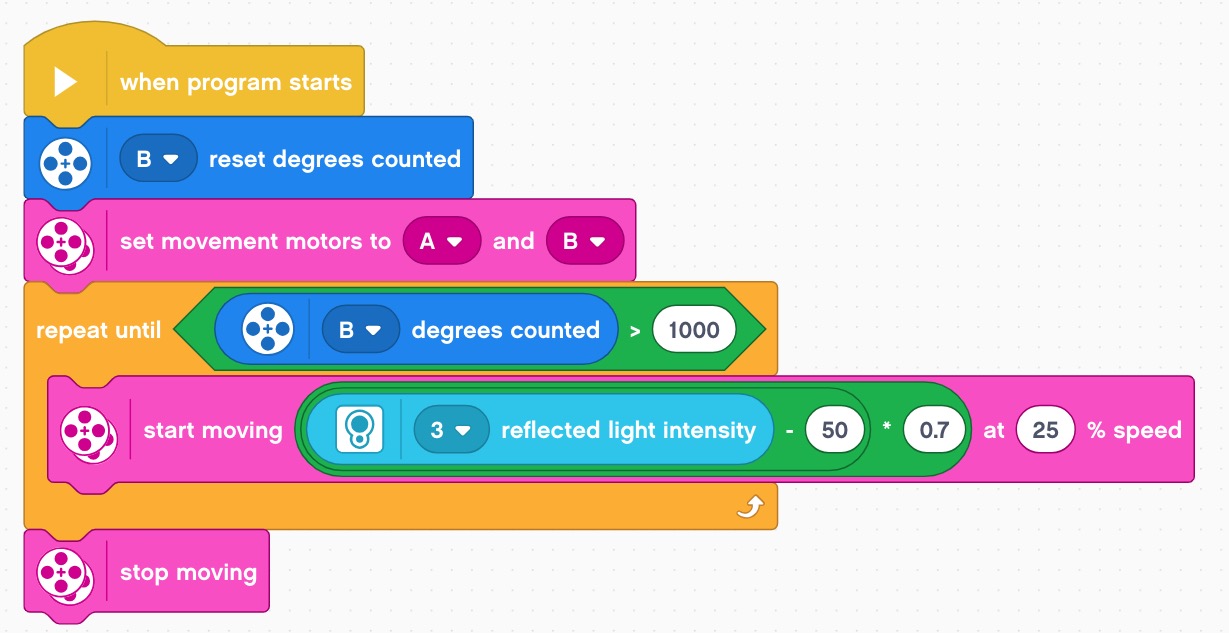
4. 応用:ライントレースをやってみる
ライントレースをしてみましょう。下のプログラムは黒いラインをよみとってライントレースするプログラムです。数値はいろいろな条件によっては変更しなくてはいけません。